· Formas de onda senoidales alternas
·
· Radio frecuencia y sus rangos
e aplica a la porción menos energética del espectro electromagnético, situada entre unos 3 Hz y unos 300 GHz. El Hertz es la unidad de medida de la frecuencia de las ondas, y corresponde a un ciclo por segundo. Las ondas electromagnéticas de esta región del espectro se pueden transmitir aplicando la corriente alterna originada en un generador a una antena.
· Los elementos básicos y los fasores (resistor, inductor, capacitor)
· Se denomina resistor al componente electrónico diseñado para introducir una resistencia eléctrica determinada entre dos puntos de un circuito. En el propio argot eléctrico y electrónico, son conocidos simplemente como resistencias. En otros casos, como en las planchas, calentadores, etc., los resistores se emplean para producir calor aprovechando el efecto Joule.
· Es un material formado por carbón y otros elementos resistivos para disminuir la corriente que pasa. Se opone al paso de la corriente. La corriente máxima en un resistor viene condicionado por la máxima potencia que puede disipar su cuerpo. Esta potencia se puede identificar visualmente a partir del diámetro sin que sea necesaria otra indicación. Los valores más comunes son 0,25 W, 0,5 W y 1 W.
· Existen resistencias de valor variable, que reciben el nombre de potenciómetros.
INDUCTOR
Un inductor o bobina es un componente pasivo de un circuito eléctrico que, debido al fenómeno de la autoinducción, almacena energía en forma de campo magnético.
Un inductor está constituido usualmente por una cabeza hueca de una bobina de conductor, típicamente alambre o hilo de cobre esmaltado. Existen inductores con núcleo de aire o con núcleo de un material ferroso, para incrementar su capacidad de magnetismo.
Los inductores pueden también estar construidos en circuitos integrados, usando el mismo proceso utilizado para realizar microprocesadores. En estos casos se usa, comúnmente, el aluminio como material conductor. Sin embargo, es raro que se construyan inductores dentro de los circuitos integrados; es mucho más práctico usar un circuito llamado "girador" que, mediante un amplificador operacional, hace que un condensador se comporte como si fuese un inductor. El inductor consta de las siguientes partes:
Pieza polar: Es la parte del circuito magnético situada entre la culata y el entrehierro, incluyendo el núcleo y la expansión polar.
Núcleo: Es la parte del circuito magnético rodeada por el devanado inductor.
Devanado inductor: Es el conjunto de espiras destinado a producir el flujo magnético, al ser recorrido por la corriente eléctrica.
Expansión polar: Es la parte de la pieza polar próxima al inducido y que bordea al entrehierro.
Polo auxiliar o de conmutación: Es un polo magnético suplementario, provisto o no, de devanados y destinado a mejorar la conmutación. Suelen emplearse en las máquinas de mediana y gran potencia.
Culata: Es una pieza de sustancia ferro magnética, no rodeada por devanados, y destinada a unir los polos de la máquina.
También pueden fabricarse pequeños inductores, que se usan para frecuencias muy altas, con un conductor pasando a través de un cilindro de ferrita o granulado.
CAPACITOR
Un condensador (del latín "condensare") es un dispositivo que almacena energía eléctrica, es un componente pasivo. Está formado por un par de superficies conductoras en situación de influencia total (esto es, que todas las líneas de campo eléctrico que parten de una van a parar a la otra), generalmente en forma de tablas, esferas o láminas, separadas por un material dieléctrico (siendo este utilizado en un condensador para disminuir el campo eléctrico, ya que actúa como aislante) o por el vacío, que, sometidas a una diferencia de potencial (d.d.p.) adquieren una determinada carga eléctrica, positiva en una de las placas y negativa en la otra (siendo nula la carga total almacenada).
· La derivada
En cálculo (rama de las matemáticas), la derivada representa cómo una función cambia (valor de la variable dependiente) a medida que su entrada (valor de la variable independiente) cambia. En términos poco rigurosos, una derivada puede ser vista como cuánto está cambiando el valor de una función en un punto dado (o sea su velocidad de variación); por ejemplo, la derivada de la posición de un vehículo con respecto al tiempo, es la velocidad instantánea con la cual el vehículo está viajando.
La derivada de una función es un valor de entrada dado que describe la mejor aproximación lineal de una función cerca del valor de entrada. Para funciones de valores reales de una sola variable, la derivada en un punto representa el valor de la pendiente de la recta tangente a la gráfica de la función en dicho punto. En dimensiones más elevadas, la derivada de una función en un punto es la transformación lineal que más se aproxima a la función en valores cercanos de ese punto. Algo estrechamente relacionado es el diferencial de una función.
· Frecuencia en los elementos básicos
Frecuencia es una magnitud que mide el número de repeticiones por unidad de tiempo de cualquier fenómeno o suceso periódico.
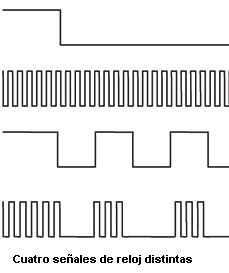
Ejemplos de ondas de distintas frecuencias; se observa la relación inversa con la longitud de onda.
Para calcular la frecuencia de un suceso. Según el SI (Sistema Internacional), la frecuencia se mide en hercios (Hz), en honor a Heinrich Rudolf Hertz. Un hercio es aquel suceso o fenómeno repetido una vez por segundo. Así, dos hercios son dos sucesos (períodos) por segundo, etc. Esta unidad se llamó originariamente «ciclo por segundo» (cps) y aún se sigue utilizando. Otras unidades para indicar la frecuencia son revoluciones por minuto (rpm). Las pulsaciones del corazón y el tempo musical se miden en «pulsos por minuto» (bpm, del inglés beats per minute).
Un método alternativo para calcular la frecuencia es medir el tiempo entre dos repeticiones (periodo) y luego calcular la frecuencia (f) recíproca de esta manera:
donde T es el periodo de la señal.
· Potencia promedio y factor potencia
Cuando se habla del valor promedio de la potencia instantánea, debe especificarse el intervalo sobre el que se toma el promedio. Así:
El valor promedio se denota con la letra mayúscula P ya que no es una función del tiempo. Si p (t) es función periódica:
Donde T es el periodo de la función.
Para estado senoidal permanente; v(t) = Vm Cos(wt+ ) e i(t) = Im Cos(wt+
) e i(t) = Im Cos(wt+ ), la potencia instantánea es:
), la potencia instantánea es:
Se observa que el primer término es una constante, independiente del tiempo y el segundo término es una función coseno (periódica) y su periodo es ½ T.
Por tanto la potencia promedio es:
Así la potencia promedio es igual a un medio del producto de la amplitud máxima del voltaje, por la amplitud máxima de la corriente y el coseno de la diferencia de los ángulos fase de la corriente y el voltaje; el sentido de la diferencia es intrascendente. FACTOR POTENCIA
Se define factor de potencia, f.d.p., de un circuito de corriente alterna, como la relación entre la potencia activa, P, y la potencia aparente, S, si las corrientes y tensiones son ondas perfectamente sinusoidales.
Si las corrientes y tensiones son ondas perfectamente sinusoidales el factor de potencia será igual a cos ϕ o como el coseno del ángulo que forman los fasores de la intensidad y el voltaje, designándose en este caso como cos φ, siendo φ el valor de dicho ángulo. De acuerdo con el triángulo de potencias de la figura 1:
(Si las corrientes y tensiones son señales perfectamente sinusoidales)
El dispositivo utilizado para medir el f.d.p. se denomina cosímetro.
· Operaciones matemáticas con números complejos
Suma
Para sumar números complejos, se siguen las normas de básicas de la aritmética, sumando los reales con los reales y los imaginarios con los imaginarios:
Resta
Al igual que en la suma, se opera como con los números reales ordinarios:
Multiplicación
Para multiplicar dos números complejos, se multiplica cada término del primero por los dos del segundo, con lo que obtenemos 4 términos:
Obsérvese que el término bdi2 pasa a ser − bd. Eso es porque i2 = − 1. Ejemplo:y asi queda
División
La división de números complejos requiere un mayor trabajo que la multiplicación y partimos de un artificio previo, basado en que el producto de un numero complejo por su conjugado da como resultado un número real:
si la división de dos números complejos, la multiplicamos y dividimos por el conjugado del denominador:
Potencias
Para elevar un número complejo a un exponente entero, se aplican las identidades notables. Se debe tener en cuenta la igualdad i2 = − 1:
· Circuitos serie y paralelo
SERIE
Un circuito en serie es una configuración de conexión en la que los bornes o terminales de los dispositivos (generadores, resistencias, condensadores, interruptores, entre otros.) se conectan secuencialmente. La terminal de salida de un dispositivo se conecta a la terminal de entrada del dispositivo siguiente.
Siguiendo un símil hidráulico, dos depósitos de agua se conectarán en serie si la salida del primero se conecta a la entrada del segundo. Una batería eléctrica suele estar formada por varias pilas eléctricas conectadas en serie, para alcanzar así el voltaje que se precise.
PARALELO
El circuito en paralelo es una conexión donde los bornes o terminales de entrada de todos los dispositivos (generadores, resistencias, condensadores, etc.) conectados coincidan entre sí, lo mismo que sus terminales de salida.
Siguiendo un símil hidráulico, dos tinacos de agua conectados en paralelo tendrán una entrada común que alimentará simultáneamente a ambos, así como una salida común que drenará a ambos a la vez. Las bombillas de iluminación de una casa forman un circuito en paralelo.
· Reactancia inductiva
· La resistencia eléctrica es definida como la dificultad u oposición que una corriente eléctrica tiene para circular por un conductor eléctrico, por ello "paga" un cierto "precio" en forma de "energía disipada por calor", la que es producida por esta circulación.
· En el caso de no ser un conductor común por tener una capa de barniz y estar enrollado sobre una cavidad o hueco muchas veces como una bobina, existirá una concentración de los efectos calóricos y magnéticos dentro de la bobina. Ahora bien, si la corriente circulante es del tipo que cambia de sentido periódicamente o corriente alterna, tanto el efecto calórico como el magnético variarán de acuerdo con leyes físicas ya conocidas, siendo el efecto magnético el que más interesa en este asunto. La ley de Lenz dice que todo conductor sometido a un campo magnético variable, crea en sí una corriente inducida que tiende a oponer sus efectos a la causa que la produce. Llamamos a la oposición a la circulación reactancia. Para una bobina o inductancia es denominada reactancia inductiva.
· Reactancia capacitiva
Así como la resistencia ofrece oposición a la corriente en un circuito de c.c., la oposición a la c.a. se llamaReactancia,así la capacitancia presenta oposición a la c.a. denominadaReactanciacapacitiva,se simboliza Xc. Así como la resistencia eléctrica se mide en Ohmios también la Xc se mide en Ohmios, y se sustituye por la R en la Ley de Ohm: I = E /R.... donde R = E / I entonces tenemos que Xc = E / I = Ohmios, y se usa para calcular la oposición que presenta un capacitor alpaso de la c.a. La reactancia de un capacitor es inversamente proporcional a dos factores: La capacitancia y la frecuencia del voltaje aplicado, expresado en fórmula, tenemos:
Donde: Xc = Reactancia capacitiva, en Ohms(Ω)
Xc = 1 /27πfc =(Ω)Ohmios π=Constante 3.1416 radianes
f = Frecuencia de la tensión aplicada en volts
c = Capacitancia en faradios
Xc = Reactancia capacitiva, en (Ω)Ohmios; π = constante 3,1416 radianes; f = Frecuencia de la tensión aplicada, en Voltios y c= Capacitancia del capacitor, en Faradios
Ahora bien, en un circuito de c.c. la oposición a la corriente se llama Resistencia, pero en un circuito de c.a. se le llama Impedancia, que se simboliza con la letra Z y se mide también en Ohms y se usa la Ley de Ohm para calcularla, sustituyendo laR porZ , tenemos:Z =E / I
Observe el circuito ilustrado, el cual tiene aplicado una tensión de 75 voltios y un flujo de 3 amperes de c.a.: la Impedancia del capacitor es de: 25 Ω
Z = E/l = 75/3 = 25 Ù
· Redes de CA en serie y paralelo
· Los diodos
Un diodo es un dispositivo de dos terminales que permite el paso de la corriente en una sola dirección. Este término generalmente se usa para referirse al diodo semiconductor, el más común en la actualidad. Este es una pieza cristalina de material semiconductor conectado a dos terminales eléctricas. El diodo de alto vacío (actualmente ya no se usa excepto para tecnologías de alta potencia) es un tubo de vacío con dos electrodos: una lámina como ánodo y un cátodo.
De forma simplificada, la curva característica de un diodo (I-V) consta de dos regiones: por debajo de cierta diferencia de potencial, se comporta como un circuito abierto (no conduce), y por encima de ella como un circuito cerrado con una resistencia eléctrica muy pequeña.Debido a este comportamiento, se les suele denominar rectificadores, ya que son dispositivos capaces de suprimir la parte negativa de cualquier señal, como paso inicial para convertir una corriente alterna en corriente continua. Su principio de funcionamiento está basado en los experimentos de Lee De Forest.
Los primeros diodos eran válvulas o tubos de vacío, también llamados válvulas termoiónicas constituídos por dos electrodos rodeados de vacío en un tubo de cristal, con un aspecto similar al de las lámparas incandescentes. El invento fue desarrollado en 1904 por John Ambrose Fleming, empleado de la empresa Marconi, basándose en observaciones realizadas por Thomas Alva Edison.
Al igual que las lámparas incandescentes, los tubos de vacío tienen un filamento (el cátodo) a través del cual circula la corriente, calentándolo por efecto Joule. El filamento está tratado con óxido de bario, de modo que al calentarse emite electrones al vacío circundante los cuales son conducidos electrostáticamente hacia una placa, curvada por un muelle doble, cargada positivamente (el ánodo), produciéndose así la conducción. Evidentemente, si el cátodo no se calienta, no podrá ceder electrones. Por esa razón, los circuitos que utilizaban válvulas de vacío requerían un tiempo para que las válvulas se calentaran antes de poder funcionar y las válvulas se quemaban con mucha facilidad.
TEOREMA DE THEVENIN
En la teoría de circuitos eléctricos, el teorema de Thévenin establece que si una parte de un circuito eléctrico lineal está comprendida entre dos terminales A y B, esta parte en cuestión puede sustituirse por un circuito equivalente que esté constituido únicamente por un generador de tensión en serie con una impedancia, de forma que al conectar un elemento entre las dos terminales A y B, la tensión que cae en él y la intensidad que lo atraviesa son las mismas tanto en el circuito real como en el equivalente.
El teorema de Thévenin fue denunciado por primera vez por el científico alemán Hermann von Helmholtz en el año 1853, pero fue redescubierto en 1883 por el ingeniero de telégrafos francés Léon Charles Thévenin (1857–1926), de quien toma su nombre. El teorema de Thévenin es el dual del teorema de Norton.







 AND
AND OR
OR NAND
NAND NOT
NOT NOR
NOR






